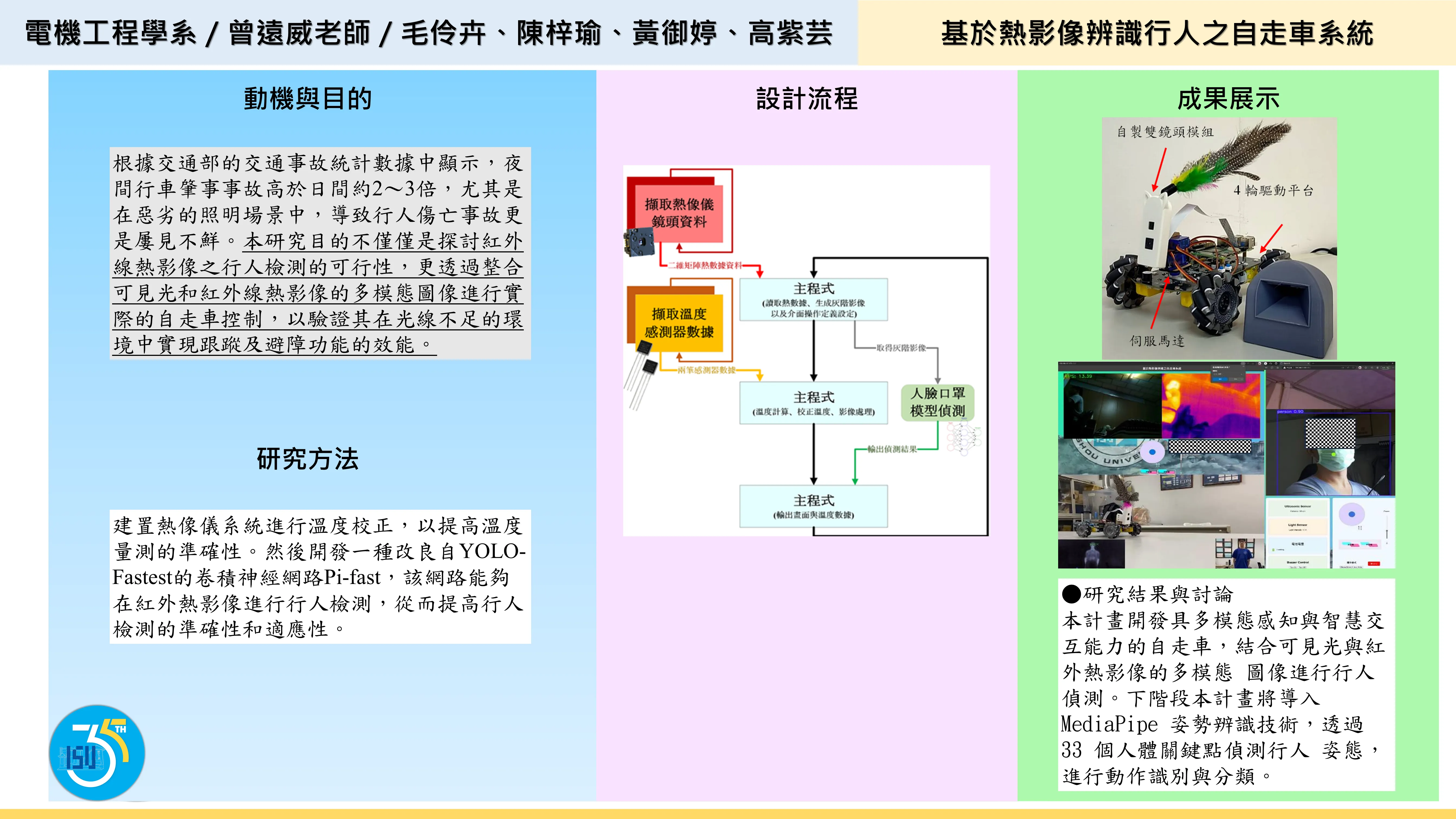
本作品基於在樹莓派主機上建置具溫度校正與人臉口罩辨識功能的熱像儀測溫系統,並且要更進一步開發以嵌入式設備建置具行人偵測與測溫用途的巡視自走車,其系統功能包含行人辨識、口罩識別、溫度校正、溫度距離補償、人員追蹤或避障以及遠端介面控制等,實現精準體溫檢測與自主巡邏兩大功能。此外,系統能適應在夜晚、光線不足環境,透過本研究提出的研究方法和技術,在光線不足的環境中實現精確的行人追蹤和避障功能,並將這些技術實際應用於自動駕駛車輛中,以提高其在夜間和惡劣天氣環境中的行駛安全性。本作品研究成果還可進一步應用於防疫、導覽、保全巡邏、災難搜救定位、生產線輸送或跟隨使用者等不同用途的機器人領域,具有廣泛的應用前景。
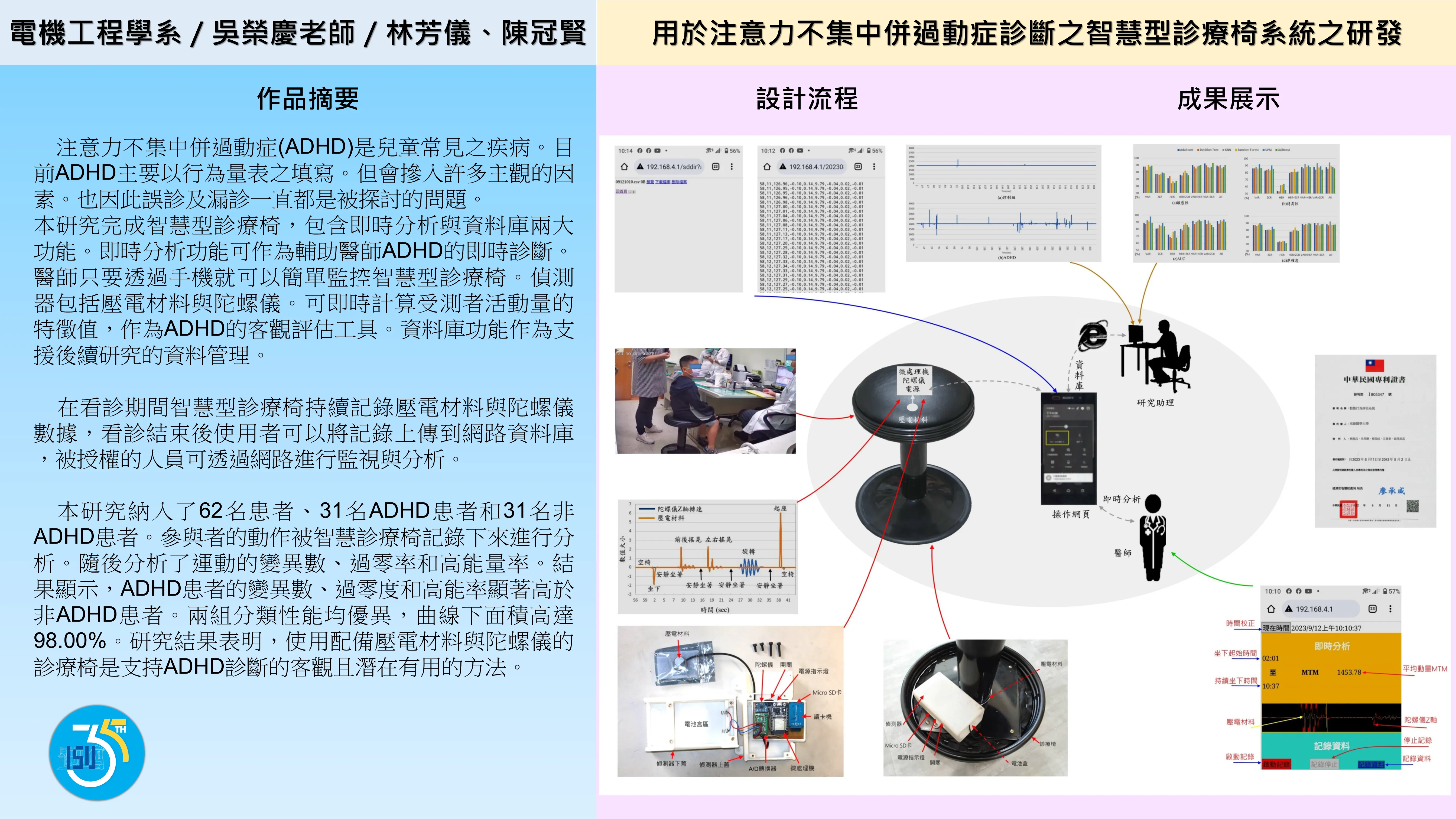
注意力不集中併過動症(ADHD)是兒童常見之疾病。目前ADHD主要以行為量表之填寫。但會摻入許多主觀的因素。也因此誤診及漏診一直都是被探討的問題。
本研究完成智慧型診療椅,包含即時分析與資料庫兩大功能。即時分析功能可作為輔助醫師ADHD的即時診斷。醫師只要透過手機就可以簡單監控智慧型診療椅。偵測器包括壓電材料與陀螺儀。可即時計算受測者活動量的特徵值,作為ADHD的客觀評估工具。資料庫功能作為支援後續研究的資料管理。
在看診期間智慧型診療椅持續記錄壓電材料與陀螺儀數據,看診結束後使用者可以將記錄上傳到網路資料庫,被授權的人員可透過網路進行監視與分析。
本研究納入了62名患者、31名ADHD患者和31名非ADHD患者。參與者的動作被智慧診療椅記錄下來進行分析。隨後分析了運動的變異數、過零率和高能量率。結果顯示,ADHD患者的變異數、過零度和高能率顯著高於非ADHD患者。兩組分類性能均優異,曲線下面積高達 98.00%。研究結果表明,使用配備壓電材料與陀螺儀的診療椅是支持ADHD診斷的客觀且潛在有用的方法。
本計畫採用電腦視覺、人工智慧及嵌入式系統技術建構口罩偵測系統,使戴口罩的偵測成為一實用的技術,只需一台攝像頭和基於Linux的樹莓派(Raspberry Pi)單晶片電腦就可完成即時辨別鏡頭下的所有人員是否配戴口罩的嵌入式系統。
口罩偵測功能是透過在影像辨識上使用基於積分圖像的Haar-like特徵集,結合AdaBoost演算法建構出具備人工智慧影像識別技術的強分類器,來偵測及判別人員是否配戴口罩,或口鼻露出,並於偵測到未戴口罩的人時發出警報聲,將可成為未來防疫的利器。除此之外,系統價格與尺寸、程式的可擴充性、使用的方便性、外觀造型評估、內部機構有無干涉的問題、實際操作上的穩定都是需考慮的部分。
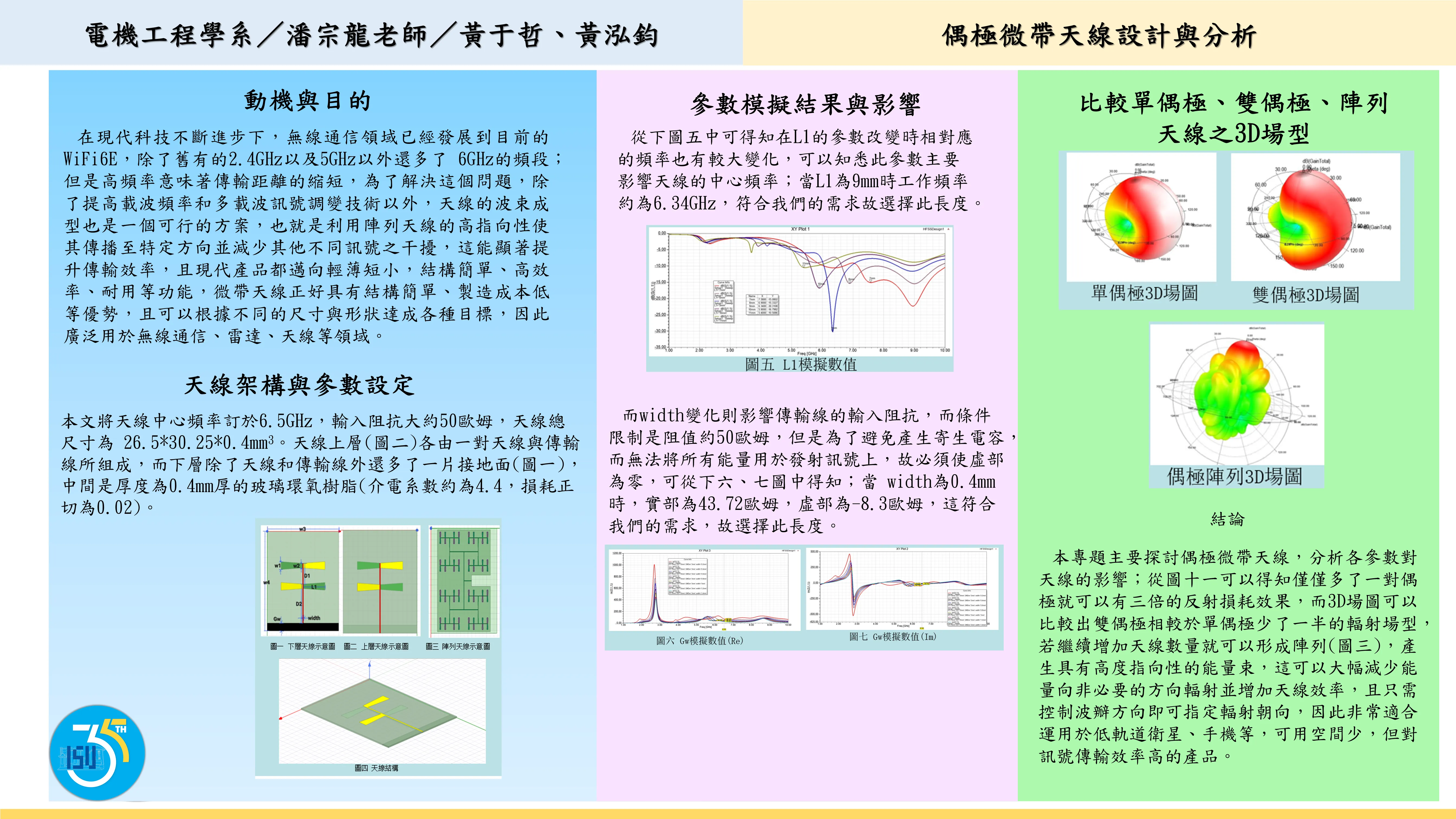
隨著WiFi 6E技術的發展,無線通訊已涵蓋2.4 GHz、5 GHz及新增的6 GHz頻段,高頻訊號雖能提供更高的傳輸速率,卻伴隨傳輸距離縮短與穿透力降低等問題。為解決此限制,除了採用多載波調變與提高頻率等方法外,天線設計的波束成型能力也是提升通訊效率的關鍵因素。而微帶天線以其結構簡單、製造成本低且適合輕薄短小裝置的特性,成為理想的解決方案。本研究以偶極結構為核心,探討傳輸線、接地面、天線本體、等對反射損耗(S11)、輸入阻抗、中心頻率和3D輻射場型的影響。透過模擬結果選出最佳參數組合後,進一步比較單偶極與雙偶極、以及陣列天線在輻射方向與反射損耗上的差異。結果顯示,偶極數量增加可明顯提升方向性與能量集中性,適合應用於如低軌衛星與行動裝置等空間有限但傳輸效率要求高的場域。
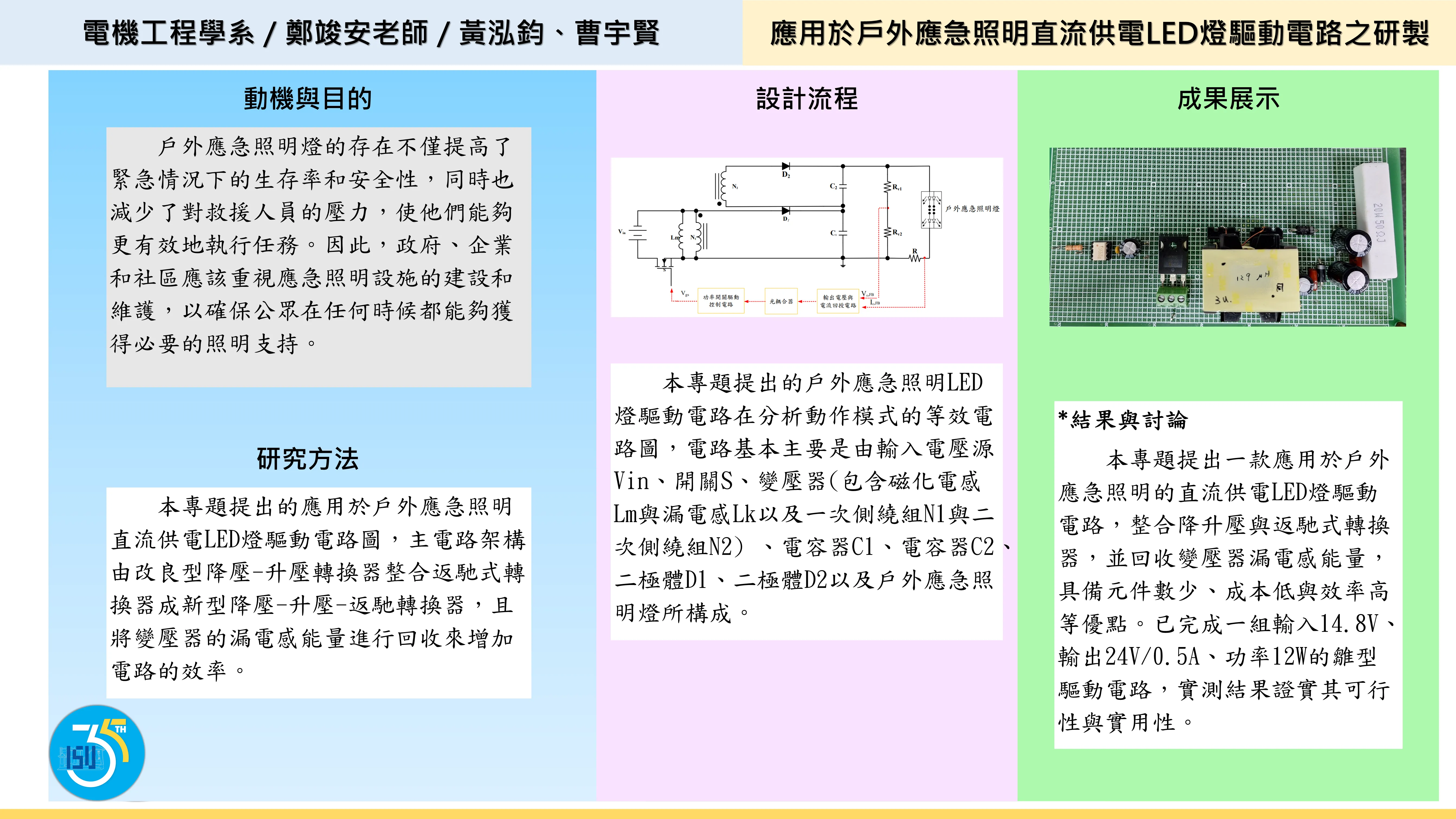
當發生自然災害、意外事故或其他突發事件導致電力中斷時,戶外應急照明系統可在黑暗中協助人們保持方向感、迅速疏散並遠離危險區域,或協助尋找安全避難場所。LED 應急燈具有體積小、壽命長、耗能低、安全性高、不易破損且無化學污染等特點,符合現代社會對節能與環保的需求,因此在照明領域的應用越來越廣泛。
本論文提出一款應用於戶外應急照明的 LED 驅動電路,主電路架構整合了改良型降壓-升壓轉換器(Modified Buck-Boost Converter)與返馳式轉換器(Flyback Converter),組成新型降-升壓-返馳轉換器(Buck-Boost-Flyback Converter)。該架構可有效回收變壓器漏電感的能量,以提高整體電路的能量轉換效率,並具有降低元件數量與成本的優勢。
本研究已完成一組輸入電壓為 14.8V、輸出功率為 12W(24V/0.5A)的戶外應急照明 LED 驅動電路原型,並透過電路模擬軟體與實際測試驗證其動作波形與效能表現。結果顯示本驅動電路設計具備良好實用性與應用潛力,適合應用於未來戶外應急照明系統。
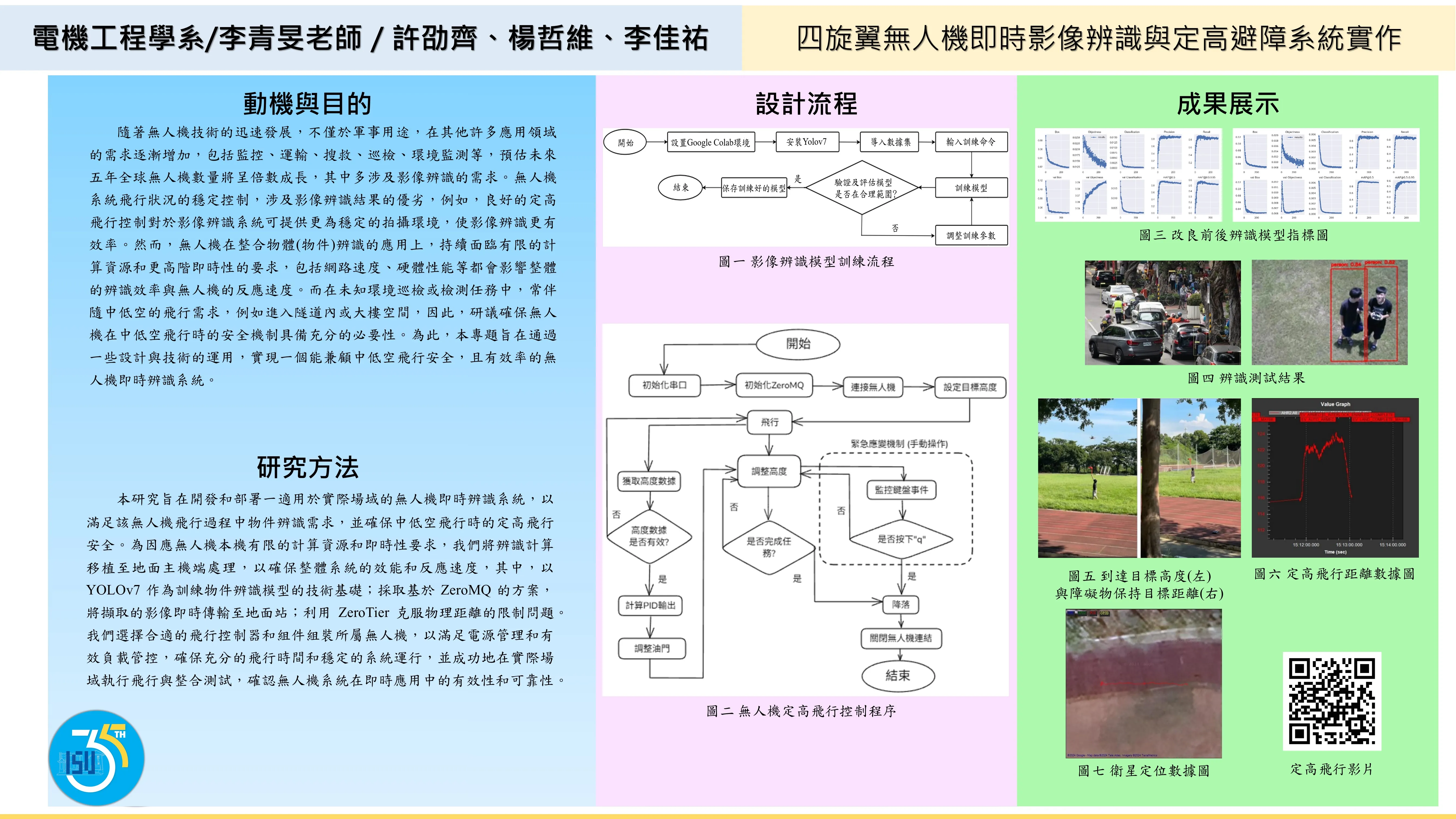
隨著無人機技術的迅速發展,不僅於軍事用途,在其他許多應用領域的需求逐漸增加,包括監控、運輸、搜救、巡檢、環境監測等,預估未來五年全球無人機數量將呈倍數成長,這其中多涉及影像辨識的需求,而無人機系統飛行狀況的穩定控制,涉及影像辨識結果的優劣,這一點可從許多文獻中觀察獲得,良好的定高飛行控制對於影像辨識系統可提供更為穩定的環境,使影像辨識更有效率。以農林畜牧業應用為例,藉由無人機能機動且大範圍地透過鏡頭巡檢、辨識實地實物狀況,在穩定的飛行前提下,能以更有效的方式將不同情況下所蒐集到的數據分類,進而研究出最佳的種植/養殖方式。然而,無人機在整合物體(物件)辨識的應用上,持續面臨有限的計算資源和更高階即時性的要求,包括網路速度、硬體性能等都會影響整體的辨識效率與無人機的反應速度。而在未知環境巡檢或檢測任務中,常伴隨中低空的飛行需求,例如進入隧道內或大樓空間,因此,研議確保無人機在中低空飛行時的安全機制具備充分的必要性。為此,本專題旨在通過一些設計與技術的運用,實現一個能兼顧中低空飛行安全,且有效率的無人機即時辨識系統。